#A multi-camera differential binocular vision sensor for robots and autonomous systems

Recent technological advances have enabled the development of increasingly sophisticated sensors, which can help to advance the sensing capabilities of robots, drones, autonomous vehicles, and other smart systems. Many of these sensors, however, rely on individual cameras, thus the accuracy of the measurements they collect is limited by the cameras’ field of view (FOV).
Researchers at Beihang University in China recently developed a new multi-camera differential binocular vision sensor with a wider FOV that could collect more accurate measurements. This sensor, introduced in a paper published in Optics & Laser Technology, could be integrated into a wide range of devices and smart robotic systems.
“Aiming at the high-precision requirements of environment perception for unmanned aerial vehicle detection, robot navigation, and autonomous driving, inspired by the multi-camera module of mobile phones, we introduced a visual perception mode based on the principle of high-precision binocular vision measurement,” Fuqiang Zhou, co-author of the paper, told Tech Xplore. “This principle involves a central high-resolution camera and peripheral auxiliary cameras that work together.”
The primary objective of the recent study by Zhou and his colleagues was to develop a sensor with a wider FOV. By utilizing multiple cameras and placing them in a strategic way, they set out to realize a coordinated system that would collect more precise measurements than conventional, single camera-based sensors.

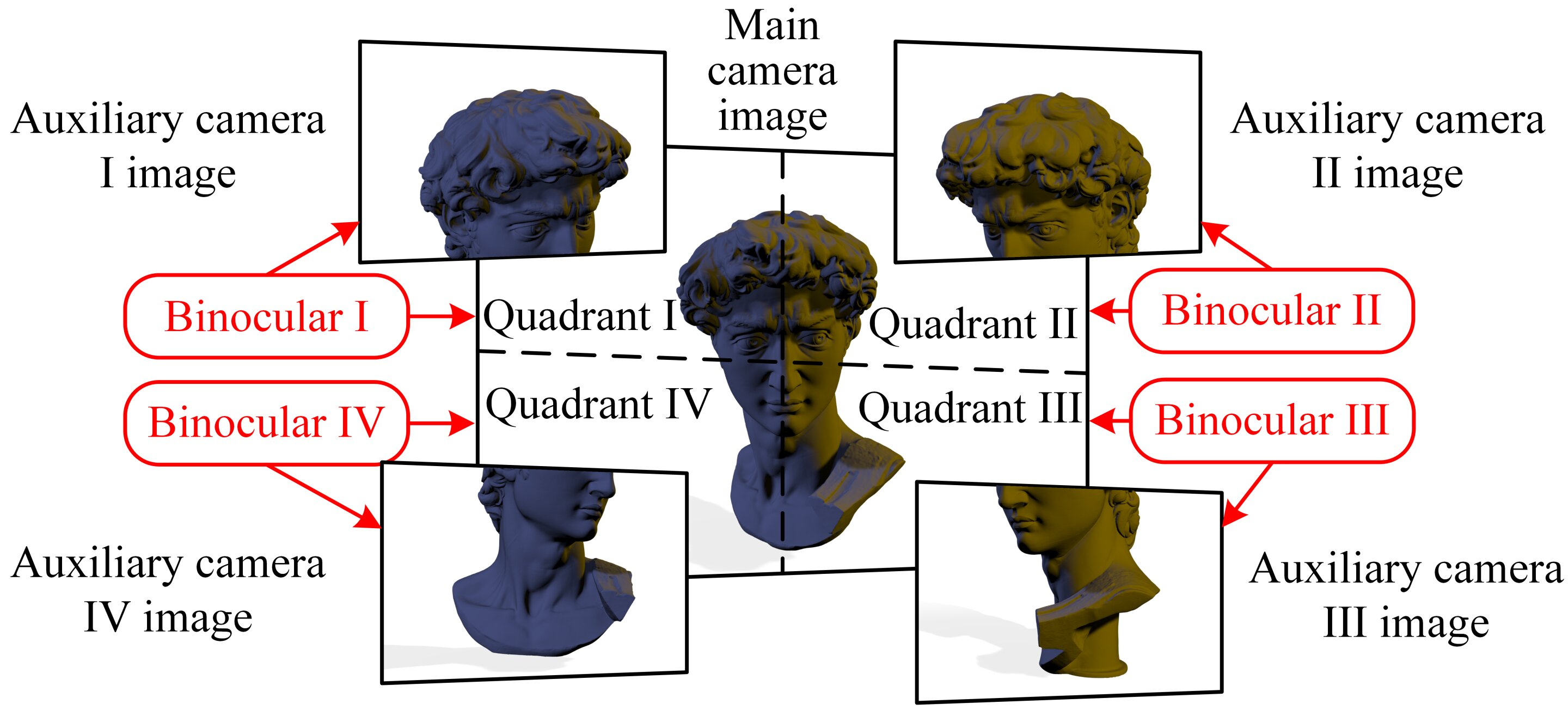
“Our multi-camera differential binocular vision sensor consists of a central main camera and four peripheral auxiliary cameras,” Zhou explained. “The four quadrant images of the main camera form four pairs of binoculars with the four auxiliary camera images. The structure parameters of the sensor are optimized from the aspects of spatial arrangement, measurement range, and accuracy to collect high-precision three-dimensional measurements.”
Zhou and his colleagues tested the sensor they developed in a series of experiments and found that its FOV was significantly broader than that of conventional binocular cameras. By combining the FOV of multiple cameras, the sensor could collect more precise measurements of its surroundings.
“The proposed sensor has higher measurement accuracy than other visual measurement methods, especially when compared with the same multi-camera measurement method, which reduces the number of cameras while improving the measurement accuracy,” Zhou said.
In the future, the sensor developed by this team of researchers could be integrated into a wide range of systems, including semi-autonomous or autonomous vehicles, robots, and motion-sensing devices. This will allow the researchers to validate its performance in real-world settings and adapt their design further to facilitate its future commercialization.
“In the field of vision measurement, binoculars are the best choice for high precision,” Zhou added. “Based on the proposed principle and idea, high-precision vision perception with a large FOV is realized. With the combination of small industrial cameras and structure design to further realize miniaturization and lightweight, this sensor may become a standard configuration similar to LiDAR in future intelligent unmanned systems.”
Lemiao Yang et al, A novel multi-camera differential binocular vision sensor, Optics & Laser Technology (2024). DOI: 10.1016/j.optlastec.2024.110624.
© 2024 Science X Network
Citation:
A multi-camera differential binocular vision sensor for robots and autonomous systems (2024, February 19)
retrieved 19 February 2024
from https://techxplore.com/news/2024-02-multi-camera-differential-binocular-vision.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
If you liked the article, do not forget to share it with your friends. Follow us on Google News too, click on the star and choose us from your favorites.
If you want to read more Like this articles, you can visit our Science category.